
W3SZ Az over El page
Most Rotators we use are "El over Az".
That means that the Elevation Rotator essentially sits on top of the Azimuth Rotator. When that is done, the math is easy. To go to a given elevation and a given azimuth, one merely sets the Azimuth Rotator to "Az" degrees, and the Elevation Rotator to "El" degrees. There is no undesired interaction between the Azimuth and Elevation rotations.
For an "Az over El" system things are not so simple. The Az and El rotations are not free of undesired interaction. For a given "El", a positive azimuth rotation will increase the elevation angle, and a negative azimuth rotation will reduce the elevation angle. And the higher the elevation, the less will be the actual azimuth rotation that results from rotating the azimuth rotator by a given amount. Additionally, the transmit and receive polarization angle will vary from that of the feed when both elevation and azimuth are non-zero.
The classic "Birdview" satellite dish rotators
are "Az over El" and thus suffer from each of these problems.
Three transformations would be helpful for those with this type of dish system.
First, one would like to know what "Az" and "El" need to be applied to the Birdview system to achieve an actual Az and El.
Second, one would like to know what Az and El would result from a given amount of "Az" and "El" applied to the Birdview rotators.
Third, one would like to know the actual feed polarization angle for a given applied "Az" and "El" compared with the polarization angle when El is zero.
For the first transformation, refer to the paper by Chuck MacCluer, W8MQW at
http://www.mth.msu.edu/~maccluer/AzEl/azel.html
For the second transformation, one basically:
1. does the elevation rotation about a vector in the X-Y plane that is rotated 90 degrees from the original heading, and
2. Does the cross product of the resultant vector with the original azis of rotation [the second vector above] to give the Z' axis around which the Azimuth rotation is performed and
3. Uses the standard matrix formula to calculate the rotation by Az degrees around this Z' axis.
As a check, applying the second transformation after the first transformation should produce the original vector [heading].
Third, the actual feed polarization is [original polarization] * azimuth rotator setting * sin(elevation rotator setting).
A simple Visual Basic 6.0 program does all of these:
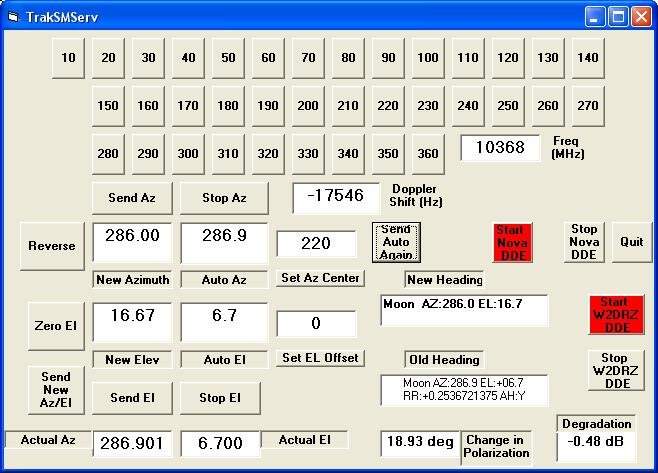
The numbered boxes between 10 and 360 rotate the azimuth rotator by this number of degrees, by sending the appropriate instruction to the W3DRZ rotator program, DRZTrack.
"Send Az" or "Send El" sends whatever number is in the associated text box to the W2DRZ rotator program, DRZTrack.
The "Zero El" botton zeros the Elevation rotator.
The "Send New Az/El" button sends to DRZTrack whatever is in the "New Azimuth" and "New Elevation" text boxes.
"Set Az Center" sets the center position for the azimuth rotator.
"Set EL Offset" sets the elevation offset, if any.
"Start Nova DDE" starts the Nova DDE and receives celestial object Az and El from Nova. The program then converts that to the "Az" and "El" that need to be sent to the Birdview rotators to achieve this position. This information will be updated as new input is received from Nova.
"Stop Nova DDE" does just that.
"Start S2DRZ DDE" starts sending position information to DRZTrack.
"Stop W2DRZ DDE" does just that.
"Send Auto Again" calculates the Birdview "Az" and "El" instructions that will result in appropriate heading of the Birdview Dish.
"Reverse" calculates the actual Az and El heading resulting from a set of "Az" and "El" instructions sent to DRZTrack and the Birdview dish.
The code for this program is at AzoverEl.txt
A zip file containing all of the necessary Visual Basic 6.0 files to run this is at:
A simple online reference on the mathematics of vector rotation is at:
https://secure.wikimedia.org/wikipedia/en/wiki/Rotation_matrix
A brief online referrence on the vector mathematics of cross products is at:
https://secure.wikimedia.org/wikipedia/en/wiki/Cross_product
Enjoy!
Copyright 1997-2010 COPYRIGHT Roger Rehr W3SZ. All Rights Reserved

Brought to you by the folks at W3SZ